先日参加したゆるメカトロ Meetup Vol.1の影響で、回転サーボでリモコンカーを作りたくなったのでゆるメカトロもくもく会に参加しました。
イベント
【コラボ企画】ゆるメカトロ! IoTやビジュアルプログラミング・LEGOカーなどでもくもく&交流!

会場は Yahoo Lodge。キャラクター色々います。


事前準備
micro:bit 2台
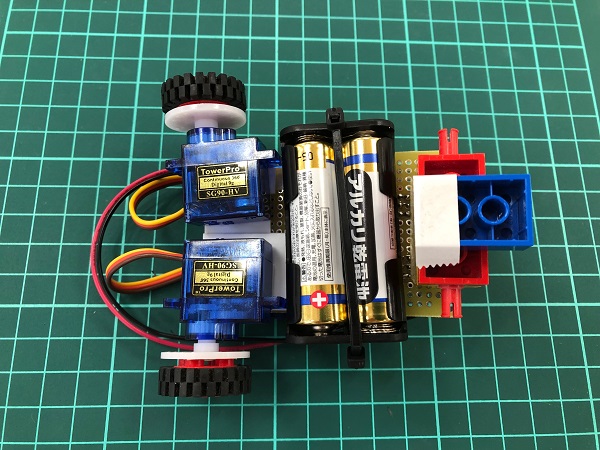
回転サーボ SG90-HV 2個
レゴ基本セット赤いバケツに入っていた車輪と車輪用ブロック。普通のレゴブロック少々。
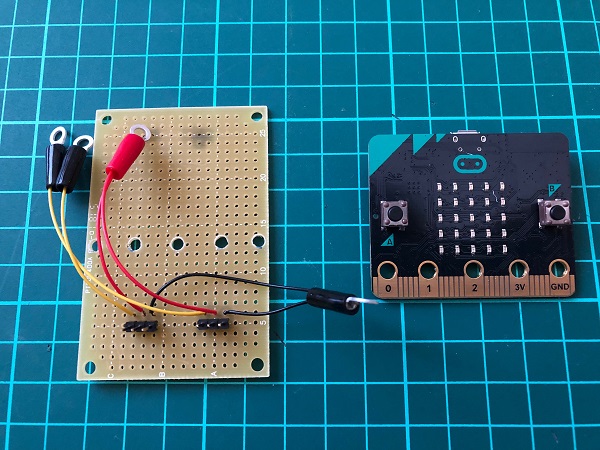
ユニバーサル基板にmicro:bitを固定し、サーボ用のヘッダピンを付けておきました。
もくもくする
回転サーボ SG90-HV を両面テープで固定
回転サーボ SG90-HV を両面テープで貼り付ける。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/vcTiPRK0wX
— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
後輪はレゴ基本セットのタイヤ。
サーボ付属の円盤?に滑り止めを期待してマスキングテープを貼ってみた。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/A2l6QyiBaG— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
グリップが足りない
グリップが足りない。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/KWbw9HQyOg
— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
直進はなんとか
直進はなんとか行けるようになった。
サーボの円盤にレゴの車輪を両面テープで貼った。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/LNeNfwISCB— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
曲がれない。
曲がれない。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/01ADxi9S31
— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
グーグルホーマーさんからアドバイス頂いた上、田中正吾さんからレゴの部品を借りてきてくださったので、こちらに交換すると曲がるようになりました。
このサイズでは抵抗の大きい車輪より滑りやすくて接地面の小さい方が良いみたいです。
曲がるようになった!@google_homer_ さんの助言で3輪にしてレゴのリベットみたいな滑るやつに改良。さすがの知見ありがとうございます!@1ft_seabass さんにも感謝
皆さんの知恵が借りられるのがまさにもくもく#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/Ir0Up9colf— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
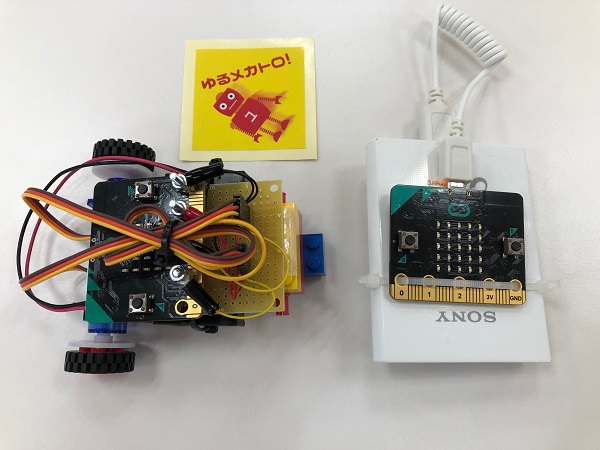
リモコン化
リモコン化した!
Bボタンで前進。傾けて左右へ回転。
micro:bitをゆさぶって停止するのは先日のイベントでの @pokiiio さんのアイデアを頂いた。#ゆるメカトロ #ビジュアルプログラミング交流会 #Noodlもくもく会 pic.twitter.com/a6pYLKyFZ4— 山添 知久(zoe)@IoT Engineer (@zoe6120) February 9, 2020
さっきまでスタンドアローンだったのに、秒でリモコン化されてる、すごい。 pic.twitter.com/P1gysIXPFJ
— Google Homer (@google_homer_) February 9, 2020
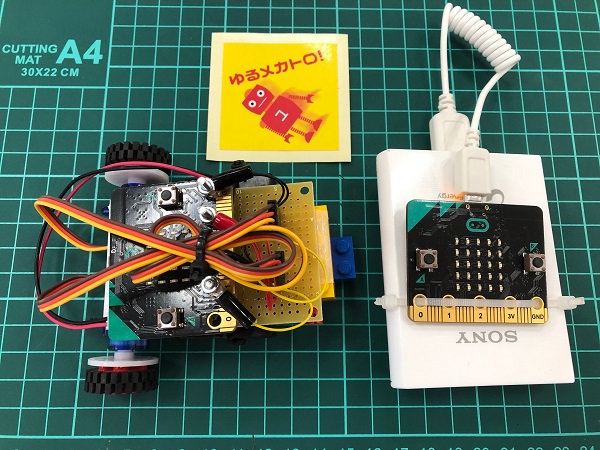
完成
後輪は滑れば良いってことで両面テープを保護紙を残してみたら良い感じに動いた。
micro:bit プログラム
「無線」ブロックを使って同じgroupを設定すれば、BLEで相互通信が簡単にできます。
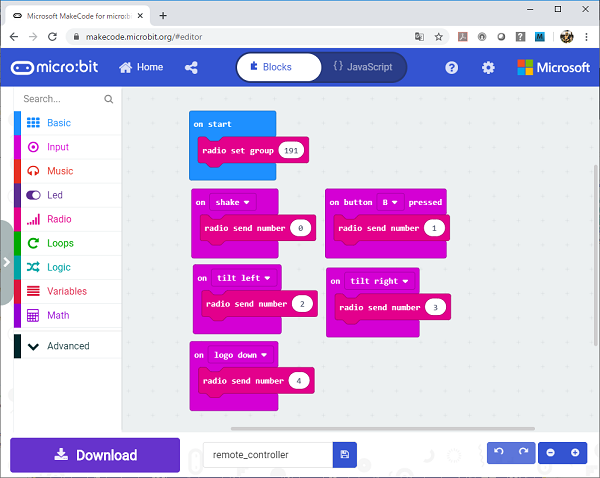
Controller リモコン側
ボタン押したり、傾けたり、ゆさぶったりで 0~4 の異なる数を送信します。
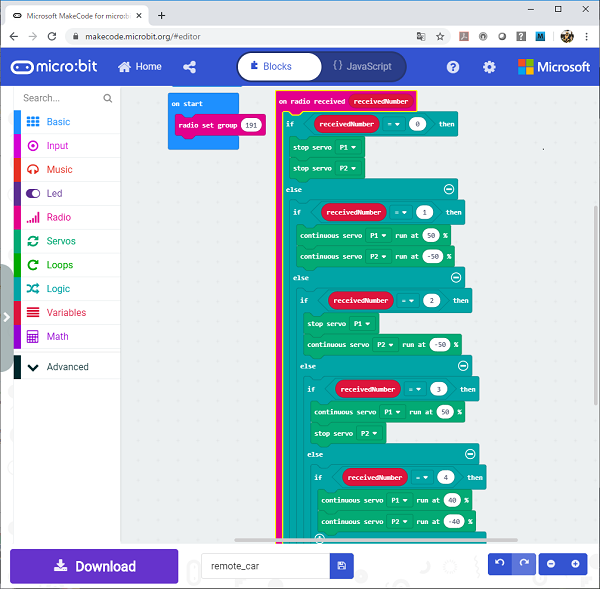
Car クルマ側
受信した数に従い、サーボを回転、停止します。
サーボの向きが反対なので、一方のサーボの回転方向を反対にすることで、進行方向が揃います。
まとめ
micro:bit超簡単にリモコンを作ることができます。ブロックエディタ楽。
回転サーボもドライバなしのmicro:bit直結で制御できます。
もくもく会楽しいです。経験豊富な方々のアドバイスがもらえたり、他の方々の実物を見ることができて得るモノが大きいです。
「【コラボ企画】ゆるメカトロ! IoTやビジュアルプログラミング・LEGOカーなどでもくもく&交流!」に関するつぶやきのまとめ
https://togetter.com/li/1466231